")
am Beispiel der Finger-Hand-Belastung beim Fügen
The Human Model Dynamicus in the Working Environment Using the Example of Finger-Hand Loading During Joining
Einleitung
Digitale Menschmodelle sind „Softwaresysteme oder Teile von Softwaresystemen, die modellhaft geometrische und weitere Eigenschaften und Fähigkeiten des Menschen oder Elemente davon abbilden, simulieren und zur Nutzung bereitstellen“ (Mühlstedt 2017). Sie werden in unterschiedlichen Bereichen der Arbeitswelt eingesetzt, von der Produktauslegung bis zur Arbeitsplatz- und Prozessgestaltung. Biomechanische Modelle sind eine Kategorie der Menschmodelle, die Prinzipien der Modellierung sowie die Gesetze der Mechanik auf den Menschen beziehungsweise die menschliche Bewegung anwenden. Das Modell Dynamicus ist ein biomechanisches Menschmodell, das als eine Komponente in das Modell eines allgemeinen Mehrkörpersystems integriert ist. Im folgenden Beitrag wird der Praxiseinsatz des Dynamicus im Projekt SimKra dargestellt (➥ Abb. 1). In diesem Projekt werden manuelle Fügevorgänge untersucht, wobei die Fragen nach deren Messbarkeit und potenziellen biomechanischen Belastungen im Fokus stehen.
Modellaufbau
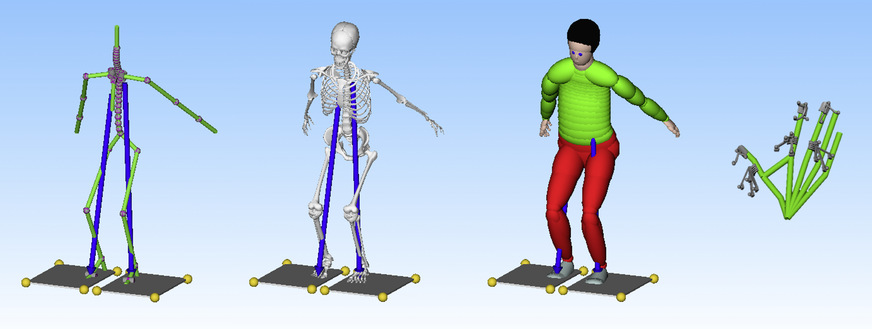
Als ein Mehrkörpersystem (MKS) wird der Mensch unter der Annahme starrer Körper und idealer Gelenke anthropometrisch abgebildet. Die starren Körper repräsentieren die physiologischen Segmente und bilden die Anthropometrie des Menschen ab. Als Eigenschaften weisen sie deren Abmaße, Masse, Volumen, Schwerpunktlage und Trägheitsmomente auf. Ideale Gelenke repräsentieren die anatomischen Gelenke und bilden die entsprechenden Bewegungsmöglichkeiten ab. Dynamicus besteht in seiner Grundkonfiguration aus 43 Körpern, die über 42 Gelenke miteinander verbunden sind. Eine hohe Detaillierung im Bereich der Wirbelsäule unterscheidet Dynamicus von anderen Ganzkörpermodellen. Der Lumbal-, Thorakal- und Zervikalabschnitt der Wirbelsäule wird mit allen 24 Wirbelkörpern abgebildet. Zur Bewegungssteuerung der vielen einzelnen Wirbelgelenke wird ein Bewegungsmuster verwendet (Hermsdorf et al. 2019).
Für den Einsatz im Projekt SimKra ist die Detailierung des Menschmodells in der Grundkonfiguration nicht ausreichend, da nur eine starre Fünf-Finger-Hand zum Funktionsumfang gehört. Aus diesem Grund erfolgte eine Verfeinerung der Modellkomponente Hand. Jede Hand wird mit 16 Körpern und 15 Gelenken detailliert modelliert (Kaiser et al. 2022). ➥ Abbildung 2 zeigt Dynamicus mit seinen Gelenken sowie ein detaillierteres Handmodell.
Sind für eine Beurteilung von Bewegungen auch Interaktionen mit der Umgebung über Interaktionskräfte von Bedeutung, so sind auch diese im Modell zu berücksichtigen. Der „reale Kontext“, in dem sich die Versuchsperson bewegt und mit dem sie interagiert, kann als ein Teilmodell in das Gesamtmodell integriert werden. Das sogenannte Kontextmodell ist ebenfalls ein MKS-Modell und kann dabei frei bewegliche Objekte oder kinematische Ketten (z. B. Roboter) repräsentieren. Wenn auch Interaktionskräfte der Umgebung mit dem Menschmodell berücksichtigt werden sollen, können diese modelliert werden. Das Gesamtmodell kann somit optional aus Menschmodell, Kontext- und Interaktionsmodell bestehen.
Bewegungsrekonstruktion und inverse Dynamik
Modellierung, Berechnung und Simulation der Bewegung erfolgen in der Software alaska/ModellerStudio. Es werden so im Anschluss an die Modellbildung Messdaten auf das Gesamtmodell übertragen. Im Anwendungsbeispiel des Projekts SimKra sind dies Daten eines markerbasierten optischen Motion-Capture-Systems. Dieses mathematische Verfahren wird als Bewegungsrekonstruktion (inverser Kinematik) bezeichnet, bei dem auf Basis der Positionsinformationen der Marker die Bewegung des Mensch- und Kontextmodells berechnet wird. Als Ergebnis liegt eine digitalisierte Bewegung des Gesamtmodells vor. Das Menschmodell bildet dabei die charakteristischen Bewegungsmerkmale des individuellen Menschen ab und es ist möglich, die kinematischen Kenngrößen wie Gelenkwinkel, Positionen von Modellkörpern im Raum oder die Position des Gesamtkörperschwerpunkts auf Basis der digitalisierten Bewegung zu berechnen.
Basierend auf den Bewegungsdaten für Mensch- und Kontextmodell kann das Verfahren der inversen Dynamik angewendet werden, wobei gemessene Kräfte und Momente in das Modell eingeprägt werden. Die Reaktionskräfte und -momente in den Gelenken, die für die Ausführung der Bewegung aufgebracht werden müssen, werden auf der Grundlage von Bewegungsgleichungen berechnet. Wirken die Gelenkmomente in Richtung der Bewegungsmöglichkeiten und innerhalb des Bewegungsraums können sie als Muskel- oder Bruttomuskelmomente bezeichnet werden. Sie sind ein Maß für die Belastung der Muskeln, die bei der Bewegung rekrutiert werden. Eine exakte Aufteilung der Belastung auf einzelne Muskeln oder Muskelstränge kann nur ein entsprechendes Muskelmodell ermitteln.
Für die Komponenten des Gelenkmoments, die nicht in Richtung der Bewegungsmöglichkeiten wirken sowie Gelenkstellungen an den Grenzen des Bewegungsraums, ist keine eindeutige Unterscheidung möglich, ob das Moment durch Muskeln oder passive Strukturen erzeugt wird.
Modellgestützte Datenerfassung
Die Qualität der aufgezeichneten Messdaten mit der Konsistenz aller kombinierten Messsysteme (z. B. Bewegungs- und Kraftdaten) sowie die exakte Durchführung von Kalibrierungen haben einen wesentlichen Einfluss auf die Simulationsergebnisse. Fehler bei der Bewegungsaufzeichnung lassen sich kaum nachträglich durch mathematische Algorithmen beheben und führen insbesondere zu falschen Kräften und Artefakten in der Bewegung des Modells.
Dynamicus/Recorder ist ein Werkzeug zur modellgestützten Datenerfassung, das Anwendende im komplexen Aufzeichnungsprozess unterstützt. Es zeigt die Daten des Motion-Capture- und Kraftmesssystems an, berechnet in Echtzeit konsistente Bewegungsdaten für das Modell und speichert alle Werte der Datenerfassung persistent ab. Derzeit enthält Dynamicus/Recorder einen Receiver für das Echtzeit-Bewegungserfassungssystem ART und einen Receiver für Kraftmessplatten. Daten nicht-echtzeitfähiger Motion-Capture-Systeme (z. B. Vicon-Marker) oder anderweitige Sensorik (z. B. Kraft- oder Drucksensoren) können nachträglich importiert werden. Dynamicus/Recorder unterstützt verschiedene Kalibriermethoden. Er ermöglicht es beispielsweise mittels kurzer aufgezeichneter Kalibrierbewegungen die Rotationszentren der Gelenke zu berechnen, wodurch die individuellen Segmentlängen sehr genau bestimmt werden können (Ehrig et al. 2006). Dieser funktionale Ansatz ist in umfangreichen Anwendungen erprobt und Schätzformeln in Genauigkeit und Zeitaufwand überlegen (Wissemann 2010). Er wurde im Rahmen des SimKra-Projekts angewandt und benötigt lediglich ein bis zwei Minuten, um das Menschmodell zu kalibrieren. Zur Kalibrierung der Hände nutzt Dynamicus eine statische Haltung in Kombination mit der Bestimmung von je 26 anatomischen Landmarks. Die dazu notwendige Aufzeichnung dauert aktuell etwa fünf Minuten pro Hand.
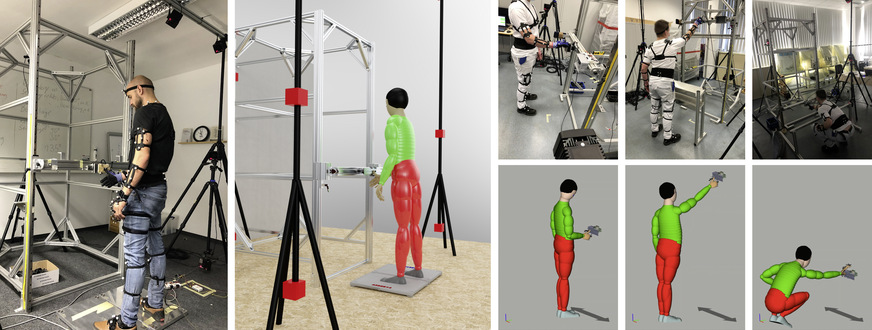
Im Projekt SimKra erfolgte die Bewegungsaufzeichnung mit einem Motion-Capture-System. Dazu wurden insgesamt 31 optische Sensoren, 19 für den Körper und zusätzlich je sechs pro Hand, verwendet. Die optischen Sensoren bestehen klassisch aus mindestens vier Markerkugeln, deren Positionen im Raum via Infrarotkameras erfasst werden. Zwei Kraftmessplatten erfassten die Bodenreaktionskräfte. Die durch das Finger-Hand-System aufgebrachten Kräfte wurden durch einen Sechs-Achs-Kraftsensor und Druckmesssensoren an den Fingerspitzen erfasst. Alle Systeme wurden synchronisiert und räumlich kalibriert. Das Anbringen der optischen Sensoren an der Versuchsperson dauerte etwa 15 Minuten, womit die Versuchsvorbereitung zuzüglich Kalibrierung 30 Minuten in Anspruch nimmt. ➥ Abbildung 3 zeigt den Aufbau des Messstandes.
Analyse
Die Simulationsergebnisse des Gesamtmodells können als Zeitreihen exportiert und für individuelle Analysen in unterschiedlichen Anwendungen verwendet werden. Auf dem Gebiet der Ergonomie haben sich EAWS (Ergonomic Assessment Work Sheet; Schaub et al. 2013) und RULA (Rapid Upper Limb Assessment; McAtamney u. Corlett 1993) als standardisierte Verfahren zur Bewertung von Montageprozessen etabliert. Dynamicus/EAWS und Dynamicus/RULA sind Softwaretools zur Beurteilung der aufgezeichneten Prozesse mit diesen Bewertungsverfahren (Härtel et al. 2012; Hermsdorf et al. 2017). Von dem Simulationsergebnis des Mensch-Kontext-Modells, das die Arbeitenden und den Arbeitsplatz repräsentiert, kann eine weitgehend automatisierte Auswertung von Arbeitsprozessen durchgeführt werden. Basis beider Bewertungsmethoden ist eine automatisierte Prozesserkennung, die Bewegungen in einzelne Bewegungsbausteine zerlegt. Solche definierbaren Bausteine, ermöglichen einen Vergleich verschiedener Arbeitsprozesse oder Ausführungsvarianten.
Für sportwissenschaftliche Einsätze werden hauptsächlich die zu Beginn des Beitrags erwähnten biomechanischen Kenngrößen für unterschiedliche Bewegungsausführungen verglichen. Zum Beispiel werden beim Skispringen die tangential wirkende Anlaufgeschwindigkeit und vertikal wirkende Absprunggeschwindigkeit sowie der Drehimpuls beim Absprung (der nur auf der Grundlage eines Modells berechnet werden kann) verwendet, um einen Sprung zu bewerten (Hermsdorf et al. 2008). Ein anderes Beispiel liefert das Sportschwimmen, wo Starttechniken durch Analyse der Interaktion der Athleten mit dem Startblock (Formicola u. Rainoldi 2015) und verschiedene technische Varianten durch die Gelenkmomente für Hüft- und Kniegelenk bewertet werden. In allen Fällen ist die Gegenüberstellung mit sportlichen Höchstleistungen von Interesse. Nach dem gleichen Prinzip erfolgt die biomechanische Analyse im Projekt SimKra als Gegenüberstellung aufgenommener Prozesse mit Kenngrößen maximal möglicher Leistungsfähigkeit.
Beispiele aus dem Projekt SimKra
Wie in der Einleitung bereits erwähnt, stellt SimKra Fragen nach der Messbarkeit manueller Fügekräfte und deren potenzieller Belastung. Am vorgestellten Messstand (vgl. Abb. 3) wurden dazu verschiedene Versuchsreihen durchgeführt. Eine Versuchsreihe fokussierte auf die Frage, wie die manuelle Kraftaufbringung mit dem Finger am Ort des Fügens messbar ist. Dazu absolvierte eine Testperson insgesamt 175 Messungen – 20 Messungen, bei denen sie eine Kraft ohne Bewegung (statische Ausführung) direkt auf den Sechs-Achs-Kraftsensor aufbrachte, und 155 Messungen, bei denen sie verschiedene Fügeelemente in eine Lochplatte vor dem Sechs-Achs-Kraftsensor fügte (dynamische Ausführung). Im Anschluss erfolgte eine Gegenüberstellung unterschiedlicher Messmethoden mit den Werten des Sechs-Achs-Kraftsensors an der Fügestelle.
Im Ergebnis konnte gezeigt werden, dass die Kraftwerte an der Fügestelle durch das Dynamicus-Menschmodell sehr exakt berechnet werden können, wenn die Bodenreaktionskräfte der Kraftmessplatten eingeprägt werden. Mittlere Abweichungen unter 1 Newton (N) und Limits of Agreement von 12 N für dynamische Kraftaufbringungen in einem Messspektrum von 30–180 N verdeutlichen dies. Diese Ergebnisse zeigen, dass es mit Dynamicus möglich ist, auch Interaktionskräfte an Arbeitsplätzen zu ermitteln, die nicht direkt durch einem Sechs-Achs-Kraftsensor erfassbar sind.
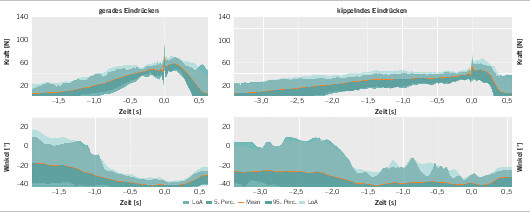
Eine weitere Versuchsreihe ging der Frage nach, welche biomechanischen Belastungen im Finger-Hand-System während des Fügens mit einem Daumenkontaktgriff vorliegen. Dazu wurden über 600 Messungen mit fünf Versuchspersonen bei den Anwendungspartnern des Projekts durchgeführt. In drei verschiedenen Körperhaltungen wurden Fügeelemente mit dem Daumenkontaktgriff gefügt. Ein Auszug der Ergebnisse soll verdeutlichen, welche Werte in welcher Form bereitgestellt werden können. Eine Gegenüberstellung mit der individuellen maximalen Leistungsfähigkeit (maximale Kräfte, Momente oder Winkel) erlaubt die Beurteilung der Beanspruchung. Dazu mussten zuerst verschiedene Technikkategorien gebildet werden. Im Folgenden werden für ein Fügeelement der Kategorie Tannenbaumclip zwei Techniken gegenübergestellt: ein gerades Eindrücken oder ein kippelndes Eindrücken. Dazu werden die Aktionskraft an der Fingerspitze sowie die Winkelverläufe des Daumenendgelenks in einer Grafik visualisiert (➥ Abb. 4). Es ist sichtbar, dass ein gerades Eindrücken ein höheres Kraftniveau erfordert (links oben), das jedoch nur über einen kurzen Zeitraum erzeugt wird. Eine kippelnde Bewegung (rechts oben) reduziert das Kraftniveau deutlich, dauert jedoch länger. Ein Blick auf die Gelenkwinkelverläufe zeigt, dass ein gerades Eindrücken besser reproduzierbar ist und somit weniger Streuung im Bewegungsverhalten erzeugt (unten). Die kippelnde Bewegung ist im Bewegungsverhalten unterschiedlicher und damit schwierig zu interpretieren. Die Überstreckung des Daumenendgelenks ist für beide Techniken vergleichbar und im Mittel bei 9° weniger als während einer maximalen Belastung. Mit 56 % (gerades Eindrücken) oder mit 46 % (kippelndes Eindrücken) der maximalen Kraft sind beide Ausführungen deutlich submaximal, wobei das resultierende Gelenkmoment mit 2 Newtonmeter (Nm) oder 1,5 Nm zwischen 35 und 25 % einer maximalen Kraftaufbringung liegt. Es ist somit deutlich, dass die Anwendung kippelnder Bewegungen die Belastung durch das Kraftniveau deutlich reduzieren kann, wobei entsprechend höhere Fertigungszeiten geplant werden müssten.
Zusammenfassung
Der Beitrag beschreibt den grundlegenden Ablauf einer Messung unter Verwendung des biomechanischen Menschmodells Dynamicus. Für einige wichtige Schritte erfolgt eine detailliertere Beschreibung. Ziel war es, nicht nur den Ablauf verständlich darzulegen, sondern auch auf die zu erwartenden Ergebnisse zu fokussieren. Anhand einer verkürzten Darstellung einiger Versuche des Projekts SimKra und einiger beispielhafter Ergebnisse soll dies verdeutlicht werden. Dabei zeigen die Ergebnisse nicht nur, dass es möglich ist die Belastung von Arbeitsprozessen zu quantifizieren. Es wird auch hervorgehoben, dass unter Verwendung des Menschmodells eine Berechnung von Größen möglich ist, die nicht direkt gemessen werden können. So kann über die Erfassung der Bodenreaktionskräfte mittels Kraftmessplatten eine Aktionskraft des Fingers an einer Fügestelle berechnet werden, die sonst nicht erfassbar wäre.
In Analogie zu sportwissenschaftlichen Anwendungen, die in Kooperation mit Bewegungswissenschaften entstanden, liegt eine zukünftige Herausforderung in der medizinisch korrekten Interpretation der Messdaten. Diese Interpretation ist stark situationsspezifisch und kann nur durch die gemeinsame Anwendung der Technologie in Studien mit medizinischem Fachpersonal entstehen.
Danksagung: Dieser Beitrag wäre ohne die Unterstützung durch die Sächsische Aufbaubank (SAB) sowie dem Europäischen Sozialfonds (ESF; FuE-Verbundprojektförderung: SimKra FKZ 100376593) nicht möglich gewesen.
Interessenkonflikt: Die Autoren erklären, dass sie innerhalb der vergangenen Jahre für die Entwicklung des Dynamicus tätig waren. Interessenkonflikte liegen keine vor.
Literatur
Ehrig RM, Taylor WR, Duda GN, Heller MO: A survey of formal methods for determining the centre of rotation of ball joints. J Biomechan 2006; 39: 2798–2809.
Härtel T, Keil A, Busche C, Schmickartz S: Eine Modellierungs- und Simulationsmethode zur automatisierten Bewertung von Arbeitsplätzen nach dem EAWS-Verfahren. In: Bericht zum 58. Arbeitswissenschaftlichen Kongress, 22.02.–24.02 (S. 173-176). Dortmund: GFA-Press, 2012.
Hermsdorf H, Hofmann N, Keil A: Bewertung digital erfasster Bewegungen mit Dynamicus. In: Bullinger-Hoffmann AC, Mühlstedt J (Hrsg.): Homo Sapiens Digitalis – Virtuelle Ergonomie und digitale Menschmodelle. Berlin: Springer, 2016, 329–335.
Hermsdorf H, Hofmann N, Keil A: Alaska/Dynamicus–human movements in interplay with the environment. In: DHM and posturography. Cambridge: Academic Press, 2019, S. 187–198.
Kaiser A, Hofmann N, Hermsdorf H: Precision of Marker-Based Finger Tracking for Broad Biomechanical Studies Using 6DOF Targets. In: Scataglini S, Rajulu S (Hrsg.): Digital Human Modeling and Applied Optimization. AHFE International Conference. AHFE Open Access, 2022, Vol. 46. AHFE International, USA.
McAtamney L, Corlett N: RULA e a survey method for investigation of work-related upper limb disorders. Appl Ergon 1993; 24: 91–99.
Mühlstedt J: Digitale Menschmodelle. In: Bullinger-Hoffmann AC, Mühlstedt J (Hrsg.): Homo Sapiens Digitalis – Virtuelle Ergonomie und digitale Menschmodelle. Berlin: Springer, 2016, S. 72–182.
Schaub K, Caragnano G, Britzke B, Bruder R: The European assembly worksheet. Theor Issues Ergon Sci 2013; 14: 616–639.
Wissemann I: Validierung prädiktiver und funktionaler Methoden zur Lokalisierung des Mittelpunktes des menschlichen Hüftgelenkes (Dissertationsschrift). Sporthochschule Köln, 2010.
doi:10.17147/asu-1-240861

Kernaussagen
- Dynamicus ermöglicht die softwaregestützte Erfassung von Sensordaten und deren Übertragung auf ein individualisiertes Menschmodell in großen Messreihen.
- Mithilfe des Modells können Kennwerte innerhalb eines Prozesses berechnet werden, die messtechnisch nicht direkt erfassbar sind. Darunter zählen biomechanische Größen wie Gelenkmomente oder Gelenkwinkel, aber auch Interaktionsgrößen wie Aktionskräfte zum Fügen von Bauteilen.
- Dynamicus unterstützt damit die detaillierte Untersuchung von Arbeitstätigkeiten und kann arbeitsmedizinischem Personal zusätzliche Informationen über spezifische Tätigkeiten oder Situationen liefern.
Kontakt

Foto: privat
Koautorin und Koautor

Das PDF dient ausschließlich dem persönlichen Gebrauch! - Weitergehende Rechte bitte anfragen unter: nutzungsrechte@asu-arbeitsmedizin.com.





