: 1 = Rucksack mit Aktoreinheit und Akku, 2 = Befestigung des Führungsschlauches der künstlichen Sehnen, 3 = elastische Armbänder, 4 = IronHand ® -Handschuh, 5 = vordere Befestigungsgurte, 6 = Bedienpanel, 7 = Befestigung Bedienpanel, 8 = seitlicher Verbindungsgurt, 9 = künstliche Sehnen (rot), 10 = Kraftsensoren im IronHand®-Handschuh
Fig. 1: Principle drawing IronHand ® modified (Bioservo Technologies AB 2019): 1 = Backpack with control unit and battery, 2 = Tube attachment of artificial tendons, 3 = Elastic arm straps, 4 = IronHand ® glove, 5 = Front fastening straps, 6 = Control panel, 7 = Control panel attachment, 8 = Side tie strap, 9 = Artificial tendons (red), 10 = Force sensors in IronHand ® glove")
Influence of an active hand exoskeleton on muscle activity of the forearm in industrial assembly grip types
Objective: The study aims to identify the effects of the soft exoskeleton Bioservo IronHand® on muscle activity of the forearm flexor muscles in the following gripping tasks relevant to automotive assembly: 2-finger grip (2Finger), 5-finger grip (5Finger), full-hand grip (HandUmf).
Methods: Twelve subjects were included in the study. The following exoskeleton conditions were applied to each subject for each grip task: Exoskeleton off (Off), Exoskeleton on, Locking Tendency 0 % (On_LT0) and Exoskeleton on, Locking Tendency 85 % (On_LT85) in order to examine their effects on the myoelectrical muscle activity of the forearm flexors at 50 % of the individual maximum hand strength (measured at M. flexor digitorum superficialis).
Results: In the 2Finger condition, mean muscle activity, normalised to maximal muscle activation (MVE), increased significantly in On_LT0 (22.84 %MVE) compared to Off (18.51 %MVE, +4.33 %MVE, 95% CI [+1.88 %MVE; +6.78 %MVE]). No significant differences in muscle activity were observed for the 5Finger condition (Off: 19.38 %MVE, On_LT0: 20.37 %MVE, and On_LT85: 18.80 %MVE). For 2Finger and 5Finger conditions, clear intraindividual increases of muscle activity (> Root Mean Square Error) were observed for one-third and one-quarter of all subjects respectively. In the HandUmf condition, mean muscle activity decreased significantly in both On_LT0 (28.87 %MVE, –4.35 %MVE, 95% CI [–1.36 %MVE; –7.35 %MVE]) and On_LT85 (26.98 %MVE, –6.24 %MVE, 95% CI [–3.25 %MVE ; –9.24 %MVE]) compared to Off (33.23 %MVE).
Conclusion: The soft exoskeleton Bioservo IronHand® may reduce myoelectrical muscle activity of the forearm flexor muscles at 50 % of the maximum hand strength during HandUmf by 13 % (95% CI [4 %; 22 %]) for On_LT0 and 19 % (95% CI [10 %; 28 %]) for On_LT85 conditions. However, in 2Finger and 5Finger grip tasks, up to one third of the subjects showed increases in muscle activity of up to 120 % (reference level without support). Based on these results, the suitability of the exoskeleton remains questionable at least for these specific grip tasks at 50 % of the maximum hand strength.
Keywords: exoskeleton – hand – work – grip – electromyography (EMG)
ASU Arbeitsmed Sozialmed Umweltmed 2019; 55: 503-512
Einfluss eines aktiven Hand-Exoskeletts auf die Muskelaktivität im Unterarm bei industriellen Montage-Greifarten
Zielstellung: Ziel der vorliegenden Studie ist zu untersuchen, ob das Hand-Softexoskelett Bioservo IronHand® einen Effekt auf die Muskelaktivität der Unterarmflexoren bei folgenden montagerelevanten Greifarten hat: 2-Finger-Zufassungsgriff (2Finger), 5-Finger-Zufassungsgriff (5Finger), Handumfassungsgriff (HandUmf).
Methoden: Mit einem Within-Subject-Studiendesign (12 Probanden) wurden für jeden Greiffall die Einflüsse ohne Unterstützung der IronHand® (Off), mit Unterstützung der IronHand® und Locking Tendency 0 % (On_LT0)
und mit Unterstützung der IronHand® und Locking Tendency 85 % (On_LT85)
auf die myoelektrische Muskelaktivität der Unterarmflexoren, gemessen am M. flexor digitorum superficialis, bei 50 % der individuellen maximalen Greifkraft untersucht.
Ergebnisse: Für den Greiffall 2Finger nahm die mittlere Muskelaktivität, normalisiert auf die maximale Muskelaktivierung (MVE), zwischen den Bedingungen Exoskelett Off (18,51 %MVE) und Exoskelett On_LT0 (22,84 %MVE) statistisch signifikant zu (+4,33 %MVE, 95%-KI [+1,88 %MVE; +6,78 %MVE]). Bei der Greiftätigkeit 5Finger konnten über die Mittelwerte der Versuchsbedingungen Off (19,38 %MVE), On_LT0 (20,37 %MVE) und On_LT85 (18,80 %MVE) keine statistisch signifikanten Effekte nachgewiesen werden. Für die Greiffälle 2Finger und 5Finger zeigten ein Drittel bzw. ein Viertel der Probanden mit Exoskelett deutlich Steigerungen der Muskelaktivität (> Root Mean Square Error). Für HandUmf reduzierte sich die mittlere Muskelaktivität des M. flexor digitorum superficialis von 33,23 %MVE für Exoskelett Off auf 28,87 %MVE mit Exoskelett On_LT0 (–4,35 %MVE, 95% KI [–1,36 %MVE; –7,35 %MVE]) und dann auf 26,98 %MVE mit Einstellung On_LT85 (–6,24 %MVE, 95%-KI [–3,25 %MVE; –9,24 %MVE]) jeweils statistisch signifikant.
Schlussfolgerung: Der Einsatz der IronHand® kann die myoelektrische Muskelaktivität der Unterarmflexoren im Handumfassungsgriff bei 50 % der Maximalkraft um 13 % (On_LT0, 95%-KI [4 %; 22 %]) bzw. 19 % (On_LT85, 95%-KI [10 %; 28 %]) senken. Im 2-Finger- und 5-Finger-Zufassungsgriff erhöht sich allerdings für bis zu einem Drittel der Probanden die Muskelaktivität um bis zu 120 % (Referenzniveau ohne Unterstützung). Nach bisherigem Erkenntnisstand erscheint die IronHand® für diese Greiffälle, zumindest bei 50 % der Maximalkraft, als ungeeignet.
Schlüsselwörter: Exoskelett – Hand – Arbeit – Greifen – Elektromyographie (EMG)
Einleitung
Exoskelette stoßen seit einigen Jahren in der Industrie auf Interesse, um gezielt körperliche Beanspruchung an Montagearbeitsplätzen zu reduzieren, für die mit konventionellen technischen Hilfsmitteln/Werkzeugen oder organisatorischen Maßnahmen keine Beanspruchungsreduktion realisierbar ist (Nussbaum et al. 2019; McFarland et al. 2019). Im Kontext körperlicher Arbeit bezeichnet der Begriff Exoskelett ein am Körper tragbares Unterstützungssystem, das mechanisch auf den Körper des Nutzers einwirkt und so arbeitsbedingte Belastungen reduzieren soll (DGUV 2019). Allerdings existiert weder eine einheitliche Definition des Begriffs „Exoskelett“, noch eine einheitliche Kategorisierung für Exoskelette. Exoskelette können zum Beispiel nach der zu unterstützenden Körperregion (Beine, Rumpf, Schulterbereich, Ganzkörper) oder nach dem entsprechenden Anwendungsgebiet (Industrie, Militär, Rehabilitation) klassifiziert werden. Um Kräfte zu übertragen, nutzen harte Exoskelette formstabile, steife Strukturen, beispielsweise aus Karbon oder Aluminium. Weiche Exoskelette (Soft-Exoskelette) hingegen übertragen Kräfte über textile Elemente (Bai et al. 2018; Fox et al. 2019). Des Weiteren wird in Abhängigkeit von der Art der Unterstützung zwischen aktiven und passiven Exoskeletten unterschieden. Aktive Exoskelette werden in der Regel elektrisch oder pneumatisch angetrieben, während passive Exoskelette über keinen eigenen Antrieb verfügen. Sie nutzen die Bewegungen des Trägers, um etwa einen Federmechanismus vorzuspannen, der nachfolgend eine andere Bewegung unterstützt.
Der derzeitige wissenschaftliche Erkenntnisstand zur Wirksamkeit von Exoskeletten ist widersprüchlich. Einige wissenschaftliche Studien deklarieren eine Reduktion körperlicher Beanspruchung beim Einsatz von Exoskeletten für industrielle Tätigkeiten (Huysamen et al. 2018; Rashedi et al. 2014). Andere Studien berichten von unerwarteten und potenziell unerwünschten Effekten wie erhöhter Muskelaktivität anderer Muskeln, erhöhtem Energieumsatz, Bewegungseinschränkungen, veränderten Bewegungsmustern oder Beschwerden durch lokale Druckspitzen (Baltrusch et al. 2019; Bosch et al. 2016; Theurel et. al. 2018). Beim Einsatz von Exoskeletten ergeben sich diverse Herausforderungen. So können passive Exoskelette mit Federmechanismen die Gesamtheit der auf den Körper wirkenden Kräfte nach dem dritten Newton’schen Gesetz (lat.: actio est reactio) nicht reduzieren, sondern wirkende Kräfte lediglich auf eine andere oder mehrere Körperregionen verlagern. Ausnahmen sind passive Exoskelette mit externen Widerlagern, die Kräfte zum Beispiel in den Boden einleiten. Diese Exoskelette sind jedoch für viele Tätigkeiten ungeeignet, insbesondere wenn auf engem Raum gearbeitet werden muss. Gleichzeitig können unerwünschte Effekte wie verringerte Balance und eingeschränkte Bewegungsfreiheit auftreten (Fox et al. 2019). Des Weiteren muss die Peson, die ein passives Exoskeletts nutzt, neben ihrer eigentlichen Tätigkeit mechanische Mehrarbeit verrichten, um zum Beispiel eine unterstützende Feder vorzuspannen. Durch den technisch bedingten Wirkungsgrad von unter 100% kann die in den Federmechanismen gespeicherte Energie nicht vollständig wiedergenutzt werden. In Summe müssen Nutzerinnen und Nutzer passiver Exoskelette daher mehr Kraft aufbringen. Zur Minimierung der beschriebenen Wirkungsgradproblematik wird beispielsweise bei Exoskeletten für Überkopfarbeiten versucht, die durch Schwerkraft und Körpersegmentmasse der Arme entstehende Gewichtskraft zur Vorspannung des Federmechanismus möglichst optimal zu nutzen. Darüber hinaus ist die zuverlässige und präzise Fixierung von Exoskeletten am menschlichen Körper eine große Herausforderung, denn die Assistenzsysteme können bereits bei moderater Bewegung verrutschen. In Folge stimmen die Drehachsen des Exoskeletts nicht mehr mit denen des menschlichen Gelenks überein. Speziell aktive Exoskelette sind in diesem Fall problematisch, da bei Verschiebung eine potenziell hohe Scherkraft auf das entsprechende Gelenk induziert und gleichzeitig der Wirkungsgrad reduziert wird (Plegge 2016). Für alle bisher verfügbaren Exoskelette hat sich besonders die Krafteinleitung in andere, anatomisch und evolutionär nicht darauf ausgelegte Körperregionen als problematisch erwiesen. An diesen Stellen erzeugen wirkende Kräfte Reibung (ggf. in Verbindung mit lokalen Druckspitzen), die etwa zu vermehrter Schweißbildung, Erythemen, Läsionen und Hämatomen führen kann. Oftmals werden Exoskelette deshalb schon nach kurzer Tragezeit als unangenehm empfunden. Eigene Erfahrungen zeigen, dass Exoskelette in der Praxis häufig nicht länger als zwei Stunden tragbar sind oder aufgrund fehlender Akzeptanz vollständig abgelehnt werden (Steinhilber et al. 2020).
Aktuell werden in der Industrie meist passive Exoskelette im prototypischen Einsatz getestet, die die Beanspruchung der Schulter bei Überkopfarbeit oder des Lendenwirbelbereichs bei Lastenhandhabung reduzieren sollen (Spada et al. 2019; Hensel et al. 2019). Obgleich Erkrankungen des Rückens und der Wirbelsäule sowie Schulterläsionen entsprechend dem BKK-Gesundheitsreport die mit Abstand häufigste Ursache von Arbeitsunfähigkeitstagen sind, nehmen auch Erkrankungen des Finger-Hand-Arm-Systems in Summe einen beträchtlichen Anteil ein (Knieps et al. 2019). Untersuchungen in der Automobilindustrie zeigen einen steigenden Anteil an Beschwerden des Finger-Hand-Arm-Systems, hervorgerufen durch hohe Montagekräfte beispielsweise bei Clipsverbindungen und Montagegriffen in kurzen Takten mit hohem Auslastungsgrad (Ohlander et al. 2019). Nachdem Hand-Exoskelette bereits in der Rehabilitation eingesetzt werden (Chu et al. 2018; Proulx et al. 2020), versuchen Unternehmen mittlerweile, sich deren Potenzial zur Unterstützung des Fertigungspersonals in ersten industriellen Anwendungen zu erschließen. Unter den kommerziell verfügbaren Hand-Exoskeletten (neofact 2020; Tendo AB 2020; Bioservo Technologies AB 2020a) ist die IronHand® der Firma Bioservo Technologies AB (Kista, Schweden) das einzige aktive Soft-Exoskelett zur Unterstützung von Greiftätigkeiten speziell im industriellen Umfeld (Bioservo Technologies AB 2020b). Wissenschaftliche Publikationen zur Wirksamkeit beziehungsweise zu Effekten von Hand-Exoskeletten im Kontext industrieller körperlicher Arbeit konnten nicht gefunden werden. Die Soft-Exoskelett-Technologie der IronHand® zeigte zumindest im rehabilitativen Bereich zur Unterstützung von älteren Patienten mit eingeschränkter Handfunktionalität eine Verbesserung bei Alltagstätigkeiten sowie Potenzial als Therapie- und Assistenzgerät (Osuagwu et al. 2020; Radder et al. 2016, 2019). Allerdings ist die Übertragbarkeit dieser Erkenntnisse auf Greifarten in der manuellen Montage sehr eingeschränkt.
Fragestellung/Zielstellung
Ziel der vorliegenden Studie war es daher zu untersuchen, ob die Bioservo IronHand® einen Einfluss auf die Muskelaktivität der Unterarmflexoren bei montagerelevanten Greifarten (Greiffällen) hat. Hierzu wurde die Bioservo IronHand® während drei verschiedener Greifbedingungen untersucht:
- 2-Finger-Zufassungsgriff (Daumen/Zeigefinger, relative Häufigkeit 9 %),
- 5-Finger-Zufassungsgriff (Daumen/4-Finger, relative Häufigkeit 27,4 %),
- Handumfassungsgriff (relative Häufigkeit 13,5 %).
Diese Zufassungs- und Umfassungsgriffe gelten laut Walther (2015) als die häufigsten Greifarten an einer Automobil-Montagelinie.
Für die inferenzstatistische Prüfung der Fragestellung wurde für jeden der drei Zufassungs-/Umfassungsgriffe folgendes Hypothesenpaar formuliert:
- Nullhypothese H0: Die Unterstützung durch die IronHand® mit zwei verschiedenen Profilen hat keinen Einfluss auf die Muskelaktivität des Musculus flexor digitorum superfacialis (M.FDS).
- Alternativhypothese H1: Die Unterstützung durch die IronHand® mit zwei verschiedenen Profilen hat einen Einfluss auf die Muskelaktivität des M.FDS.
Die Hypothesen wurden zweiseitig formuliert, da in wissenschaftlichen Publikationen häufig unerwartete Effekte beim Einsatz von Exoskeletten berichtet werden.
Methoden
Stichprobe
An der Untersuchung nahmen zwölf Versuchspersonen teil (drei weiblich, neun männlich). Das mittlere Alter lag bei 27,3 Jahren, mit einer Standardabweichung von sechs Jahren. Voraussetzung für die Studienteilnahme waren Rechtshändigkeit und Verletzungsfreiheit des rechten Arms für einen Zeitraum von mindestens einem halben Jahr.
Beschreibung IronHand®
➥ Abbildung 1 gibt einen Überblick über die Komponenten und die Funktionsweise des Soft-Exoskeletts IronHand®. Das System besteht aus einem Handschuh und einem Rucksack mit Aktoreinheit inklusive Akku und Bedienungspad. Die Kraftunterstützung wird für jeden Finger separat jeweils durch zwei, medio- und lateral-palmar in den Handschuhfingern zur Fingerspitze verlaufende, künstliche Sehnen realisiert. Mithilfe der Aktoreinheit im Rucksack kann simultan Zug auf die beiden künstlichen Sehnen jedes Fingers ausgeübt werden. Die Testperson kann die Unterstützungskraft für die einzelnen Finger mit Kraftsensoren, die in die Fingerspitzen des Handschuhs eingenäht sind, dosieren. Je mehr Druckkraft auf einen Kraftsensor ausgeübt wird, desto stärker zieht das System an den zwei künstlichen Sehnen des jeweiligen Fingers. Darüber hinaus kann am Bedienpanel zwischen zwei vorkonfigurierbaren Nutzerprofilen gewählt werden. In diesen Nutzerprofilen kann beispielsweise die Gesamtempfindlichkeit des Systems oder auch ein fest definiertes Verhältnis des Unterstützungsniveaus der Finger zueinander eingestellt werden (Bioservo Technologies AB 2019; Ingvast et al. 2008). Es besteht so die Möglichkeit, die IronHand® auf wechselnde Unterstützungsanforderungen schnell einzustellen.
Konfiguration IronHand®
Am Bedienungspanel wurde ein maximales Unterstützungslevel von 75 % eingestellt (3 von 4 LEDs). Ein höheres maximales Unterstützungsniveau wurde im Rahmen von Pilotversuchen als zu stark empfunden und subjektiv unangenehm bewertet. Für die vorliegende Untersuchung wurden zwei verschiedene Nutzungsprofile, mit folgenden identischen Einstellungen, konfiguriert:
- Sensitivity: 2,6 (Empfindlichkeit bzw. Reaktivität der Kraftsensoren),
- Locking Tendency Fingers: 0 % (Erklärung siehe nächster Absatz),
- Activation Threshold: 0,3 (benötigte Kraft, um das System über die Kraftsensoren in den Fingern zu aktivieren),
- Fingerbalance: F1–4: 50 %, F5 40 % (Unterstützungsverhältnis der Finger zueinander, in der vorliegenden Studie wurde der kleine Finger 10% weniger unterstützt als die restlichen vier Finger, 50% ist der Maximalwert).
Die Profile 1 und 2 unterschieden sich lediglich in der Einstellung „Locking Tendency“. Im Profil 1 wurde die „Locking Tendency“ auf 0 % gesetzt, im Profil 2 auf 85 %. Je höher der Locking-Tendency-Wert ist, desto stärker müssen die Kraftsensoren in den Fingerspitzen entlastet werden, damit die IronHand® die Zugkraft reduziert. Auf diese Weise soll eine mit der IronHand® einmal erreichte Haltekraft mit geringerer muskulärer Anspannung aufrechterhalten werden können. Während der Untersuchung wurde die IronHand®, wie vom Hersteller empfohlen, unter Arbeitshandschuhen getragen (Towa ActivGrip XA-325).
Messtechnik
Zur Kontrolle und Messung der Griffkraft wurde ein Hand-Dynamometer (Deyard EH101) modifiziert und statisch kalibriert, um an einem Datenlogger (Biometrics DataLOG MWX8) betrieben werden zu können. Nach Kalibration betrug die maximale Abweichung der gemessenen Kraft 0,00022 % der Nennkraft (409 N). Um die bestmögliche Aktivierung der Kraftsensoren in den Fingern (Fingerspitzen) zu gewährleisten, wurden für das Handdynamometer zwei verschiedene Griffschalen im 3D-Druckverfahren hergestellt (ebene Auflageflächen für 2-Finger- und 5-Finger-Zufassungsgriff, vergrößerte runde Finger-Auflagefläche für Handumfassungsgriff). Wichtig war hierbei, dass für jeden Greiffall die gesamte Sensorfläche jedes Kraftsensors vollständig belastet werden konnte. Die Muskelaktivität des M.FDS wurde mit einem Oberflächen-EMG-System (Trigno Wireless) der Firma Delsys (Natick, MA, USA) erfasst. Der Interelektrodenabstand betrug systembedingt 10 mm (Trigno Avanti Sensor). Griffkraft- und EMG-Messung wurden mithilfe einer Delsys Triggerbox synchron gestartet. Die Messfrequenz beider Systeme betrug 2000 Hz.
Konzeption der Studie
Für die vorliegende Studie wurden, wie oben bereits näher beschrieben, die drei häufigsten Umfassungs-/Zufassungsgriffe ausgewählt:
- 2-Finger-Zufassungsgriff (2Finger),
- 5-Finger-Zufassungsgriff (5Finger),
- Handumfassungsgriff (HandUmf).
Als Zielkraft bei den Greiftätigkeiten wurde a priori 50 % der individuellen Maximalkraft beim Versuch ohne Unterstützung der IronHand (Fmax_off) definiert. Dieses Kraftniveau ermöglicht mit kurzen Pausen Wiederholungen über einen längeren Zeitraum. Mit 50 % der Maximalkraft wurde das Kraftniveau bewusst höher als die Dauerleistungsgrenze für statische Arbeit, die bei ca. 10 % der Maximalkraft liegt, gewählt (Schmidt et al. 2011). Zum einem handelt es sich bei den wiederholten Messungen des Studienprotokolls im Gesamten um dynamische Kraftanforderungen mit Pausen, zum anderen sollte mit dem höheren Kraftniveau sichergestellt werden, Einflüsse der IronHand® auf die Muskelaktivität zuverlässiger messen zu können. Der Oberflächen-EMG-Sensor (Trigno Avanti Sensor) wurde an der bauchigsten Stelle des M.FDS in Faserrichtung des Muskels positioniert. Der M.FDS wurde aufgrund seiner Funktionalität für die Beugung der Finger zwei bis fünf und seiner oberflächlichen Lage gewählt, um die muskuläre Aktivität beim Greifen bestmöglich messen zu können. Hierbei ist anzumerken, dass die isolierte Messung der elektrischen Aktivität eines Muskels im Unterarm mit Oberflächenelektroden nicht möglich ist. Bei Greiftätigkeiten werden verschiedenste Muskeln im Unterarm in differierender Ausprägung innerviert. Bei vielen Muskeln auf engem Raum, wie im Unterarm, kommt es bei der Messung der elektrischen Muskelaktivität mit Oberflächenelektroden zu Übersprechen (Crosstalk).
Mit einem Within-Subject-Design wurden für jeden Greiffall die Effekte der unabhängigen Variablen
- ohne Unterstützung der IronHand® (Off),
- mit Unterstützung der IronHand® und Locking Tendency 0 % (On_LT0) und
- mit Unterstützung der IronHand® und Locking Tendency 85 % (On_LT85)
auf die abhängige Variable „Muskelaktivität des M.FDS “ untersucht.
Die Testpersonen absolvierten die Greiffälle in folgender Reihenfolge:
- 5Finger,
- 2Finger,
- HandUmf.
Auf eine Randomisierung der Greiffälle wurde verzichtet, da keine Unterschiede zwischen den Greiffällen untersucht werden und zusätzlich induzierte Varianz durch eine Randomisierung verhindert werden sollte. Für jeden Greiffall wurde das Versuchsprogramm in ➥ Abb. 2 absolviert.
Auf eine Randomisierung der Versuchsbedingungen/unabhängigen Variablen (Off, On_LT0, On_LT85) wurde ebenfalls verzichtet, da alle Testpersonen möglichst identische Voraussetzungen haben sollten und in zwei Pilotmessungen mit dem beschriebenen Versuchsprogramm keine systematischen Ermüdungseffekte feststellbar waren.
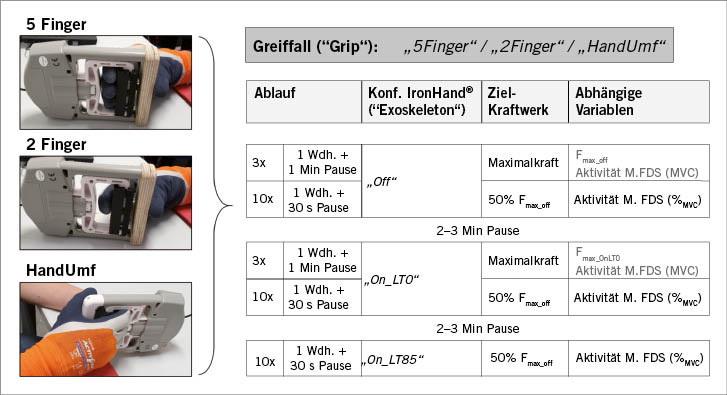
Fig. 2: Grip tasks with corresponding test programme (M.FDS = Musculus flexor digitorum superficialis)
Ablauf der biomechanischen Messungen
Nach standardisierter Erklärung des Versuchsablaufs durch den Versuchsleiter, Lesen der Teilnehmerinformation und schriftlicher Einwilligung in die Studienteilnahme inklusive datenschutzrechtlicher Einwilligung, wurde der rechte Unterarm der Testpersonen für die Anbringung der EMG-Elektrode vorbereitet (Rasieren, Anrauen zur Verringerung der Hautimpedanz, Reinigung der Hautoberfläche mit Alkoholtupfern). Im Anschluss wurde die EMG-Elektrode positioniert und geklebt. Danach wurde die Hand vermessen (Umfang, Länge) und anhand einer Größentabelle der Firma Bioservo die passende Handschuhgröße bestimmt (IronHand® und Arbeitshandschuh). Nach Anlegen der IronHand® absolvierten die Versuchspersonen ein individuelles etwa 20-minütiges Aufwärmprogramm zur Gewöhnung an die IronHand® (Greifen verschiedener Gegenstände, Testen der Locking-Tendency-Einstellungen, Üben des Erreichens einer Zielkraft mit dem Handdynamometer etc.).
Danach startete das oben bereits beschrieben Versuchsprogramm mit dem Greiffall 5Finger. Um zu vermeiden, dass die erfasste Muskelaktivität durch Unterschiede in der Hand-Arm-Stellung zwischen den verschiedenen Greifbedingungen beeinflusst wird, wurde der Unterarm während der Messungen in standardisierter Position auf einem Tisch positioniert. Die Kontrolle der Handgelenksstellung erfolgte optisch durch den Versuchsleiter. Die Testpersonen wurden angewiesen, den Arm möglichst entspannt auf den Tisch zu legen und Flexion/Extension des Handgelenks während der Messungen zu vermeiden. Die möglichst vollständige Entspannung der Unterarmmuskulatur vor und nach einer Messung wurde vom Versuchsleiter mithilfe des EMG-Systems fortlaufend kontrolliert und die Testperson gegebenenfalls angewiesen, die Unterarmmuskulatur wieder vollständig zu entspannen. Die Testpersonen nutzten die linke Hand, um das Handdynamometer zu halten und nach individuellem Empfinden optimal in der rechten Hand zu positionieren. Für die zehn wiederholten Messungen mit Zielkraft 50 % Fmax_off wurden die Testpersonen angewiesen, den individuellen Zielkraftwert zügig, aber kontrolliert zu erreichen und mindestens vier Sekunden zu halten. Hierzu konnten während der Messungen permanent der Verlauf der Kraftkurve und der aktuelle Kraftwert in Newton als Zahl auf einem Bildschirm gesehen werden. Das annähernde Erreichen des Zielkraftwerts wurde durch den Versuchsleiter optisch kontrolliert, wobei darauf verzichtet wurde, einen festen Zielbereich zu definieren. Bedingt durch das initiale 20-minütige Aufwärm-/Übungsprogramm hatten die Testpersonen keine Probleme, ihren Zielkraftwert annähernd zu erreichen. Während der Messungen waren keine Fehlversuche zu verzeichnen. Über insgesamt 1080 Messungen betrug die mittlere Abweichung vom individuellen Zielkraftwert –1,38 % (95%-KI [–1,20 %; –1,56 %]). Bei den Maximalkraftversuchen wurden die Testpersonen angewiesen, sich voll auf maximale Kraftentfaltung zu konzentrieren. In der Pause vor der letzten Greifbedingung (HandUmf) wurden die Griffschalen des Handdynamometers umgebaut, um bei den folgenden Messungen des Greiffalls HandUmf die Sensorflächen der IronHand® vollständig nutzen zu können. Die Gesamtdauer einer Messung belief sich pro Testperson auf etwa drei Stunden.
Dataprocessing und Statistik
Die Verarbeitung der Messdaten und die statistische Analyse wurden mit der Programmiersprache/Entwicklungsumgebung R durchgeführt (R. Core Team 2019).
Dataprocessing
Die EMG-Messdaten wurden mit eigens für diesen Zweck geschriebenen Programmen vollständig algorithmisch verarbeitet, um subjektive Einflüsse, wie zum Beispiel manuelle Festlegung bestimmter Bereiche in Zeitreihen, bei der Verarbeitung der Daten auszuschließen. Im ersten Schritt wurde in den Rohdatenzeitreihen der EMG-Messungen aus Phasen muskulärer Inaktivität der Bereich (Länge 2 s) mit den geringsten Amplitudenschwankungen bestimmt. Im Anschluss wurde anhand dieses Bereichs der initiale Offset korrigiert und die Absolutwerte der Zeitreihe gebildet. Die EMG-Zeitreihen wurden danach mit einem gleitenden Root-Mean-Square-Filter der Länge 300 ms (10 ms Inkremente) gefiltert (Konrad 2011).
Nachfolgend wurde für alle Maximalkraftmessungen die maximale mittlere EMG-Amplitude in einem Zeitraum von 500 ms bestimmt, um die probandenspezifische maximale Muskelaktivität zu bestimmen. Die EMG-Messungen mit 50 % Fmax_off wurden danach auf die individuell erreichte maximale Muskelaktivität (MVE) der Testpersonen normalisiert. Resultierende Einheit nach Normalisierung der Muskelaktivität ist %MVE.
Zur Bestimmung der Muskelaktivität bei den Messungen mit 50 % der Fmax_off wurde mit der Methode der kleinsten Quadrate zunächst der Bereich (Länge 3 s) mit der geringsten Abweichung von der Zielkraft bestimmt und in diesem Zeitfenster der Mittelwert der EMG-Amplitude berechnet. Die Maximalkraft Fmax_off entsprach dem höchsten erreichten Kraftwert der drei Maximalkraftmessungen.
Statistik
Die inferenzstatistische Analyse der Daten erfolgte mit einem Linearen Mixed-Effects-Modell (LMM) (Bates et al. 2015) und Intragruppen- (Greiffall) Tukey-Post-hoc-Tests (Lenth 2020). Im LMM wurden die Effekte der unabhängigen Variablen („fixed effects“) „Exoskeleton“ (Off, On_LT0, On_LT85) und „Grip“ (Greiffall = 2Finger, 5Finger, HandUmf) auf die abhängige Variable „Muskelaktivität des M.FDS“ untersucht. Die Ordinaten-Schnittpunkte der Testpersonen wurden in diesem Modell als Zufallseffekt („random effect“) modelliert. Da isolierte Effekte der unabhängigen Variablen „Grip“ und „Exoskeleton“ nicht Untersuchungsgegenstand waren, war bei der Varianzanalyse des Modells im Wesentlichen der Interaktionseffekt der unabhängigen Variablen „Grip“ und „Exoskeleton“ von Interesse. Die Voraussetzungen zur Anwendung des Modells wurden, wie allgemein üblich, grafisch überprüft (Bates et al. 2015; Gelman u. Hill 2007; Winter 2013). Offensichtliche Verletzungen der Voraussetzungen lagen nicht vor. Das Signifkanzniveau wurde a priori auf α = 0,05 festgelegt. Mangels verfügbarer klinisch relevanter Differenzen der Muskelaktivität des M.FDS bei Verwendung eines aktiven Hand-Exoskeletts konnte die statistische Power a priori nicht berechnet und damit keine Fallzahlplanung durchgeführt werden. Die statistische Power der Untersuchung wurde allerdings post-hoc („observed power“) berechnet (Galecki et al. 2013). Um probandenspezifische Veränderungen der Muskelaktivität klassifizieren zu können, wurde der Within-Subject Root Mean Square Error (RMSE) für die untersuchten Greiffälle berechnet. Mittlere Differenzen, die größer als der RMSE sind, wurden als deutliche Veränderungen eingestuft.
Ergebnisse
Isoliert waren beide unabhängigen Variablen „Exoskeleton“ mit p = 0,0115 und „Grip“ mit p < 0,0001 in der Varianzanalyse des LMM statistisch signifikant. Die statistische Power („observed power“) betrug für „Exoskeleton“ 77 % und für „Grip“ nahezu 100 %. Vor der Studie wurden generalisierbare Effekte der Variable „Exoskeleton“, über die untersuchten Greiffälle („Grip“) hinweg, als unwahrscheinlich eingeschätzt. Effekte der unabhängigen Variable „Exoskeleton“ wurden deshalb nur innerhalb der Greiffälle näher analysiert. Von besonderem Interesse war daher der Interaktionseffekt der unabhängigen Variablen „Exoskeleton“ und „Grip“ im LMM. Dieser Interaktionseffekt war in der Varianzanalyse des LMM mit p = 0,001 ebenfalls statistisch signifikant. Entsprechend wurden Post-hoc-Tests für Unterschiede innerhalb der jeweiligen Greiffälle (2Finger, 5Finger, HandUmf) gerechnet. Die statistische Power des Interaktionseffekts lag bei 98,8 % („observed power“).
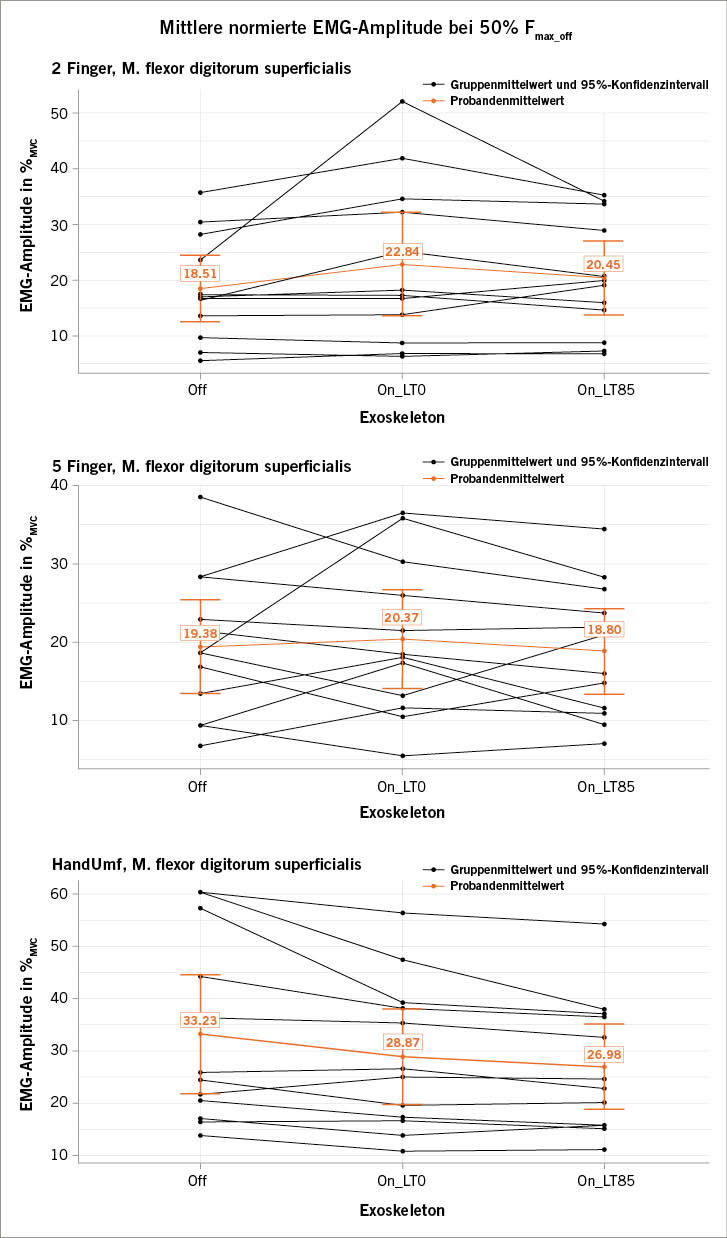
Fig. 3: Muscle activity M. flexor digitorum superficialis at 50 % Fmax_off over the independent variables Exoskeleton Off, On_LT0 and On_LT85 (grip tasks 2Finger, 5 Finger and HandUmf)
2Finger
Für den Greiffall 2Finger erhöhte sich der Mittelwert der elektrischen Muskelaktivität des M.FDS, ausgehend von der Versuchsbedingung Exoskelett ausgeschaltet (Off) zu Exoskelett aktiv mit Locking Tendency 0% (On_LT0) von 18,51 %MVE auf 22,84 %MVE, bei eingeschaltetem Exoskelett und Locking-Tendency-Einstellung 85 % (On_LT85) betrug der Mittelwert der Muskelaktivität 20,45 %MVE (➥ Abb. 3, oben). Hierbei war die mittlere Erhöhung der Muskelaktivität von Exoskelett Off zu On_LT0 (4,33 %MVE) statistisch signifikant (p = 0,0016, 95%-KI [–6,78 %MVE; –1,88 %MVE]). Die Nullhypothese musste in diesem Fall verworfen und die Alternativhypothese angenommen werden. Der statistisch signifikante Effekt wirkte allerdings entgegengesetzt zum intendierten Effekt einer Beanspruchungsreduktion durch die IronHand®. Ausgehend vom initialen Niveau der Versuchsbedingung Exoskelett Off, entsprach die statistisch signifikante Erhöhung der Muskelaktivität des M.FDS mit Exoskelett On_LT0 23 % (95%-KI [10 %; 36 %]). Systematische probandenspezifische Effekte über die Versuchsbedingungen Exoskelett Off, On_LT0 und On_LT85 waren nicht zu erkennen (Abb. 3, oben). Mit Exoskelett On_LT0 erhöhte sich die elektrische Muskelaktivität des M.FDS für 4 von 12 Testpersonen deutlich (> RMSE = 5,72 %MVE), mit On_LT85 für eine Testperson. Ausgehend von Exoskelett Off waren probandenspezifische Steigerungen der Muskelaktivität von 17,17 % bis hin zu 120,26 % zu verzeichnen (Mean On_LT0 = 52,69 % [SD = 47,42 %], On_LT85 = 44,73 %). In den Abb. 2 oben und 4 (z. B. P10) sind diese probandenspezifischen Steigerungen der Muskelaktivität gut zu erkennen.
5Finger
Bei der Greiftätigkeit 5Finger waren die Mittelwerte über die Versuchsbedingungen Off, On_LT0 und On_LT85 mit 19,38 %MVE, 20,37 %MVE und 18,80 %MVE annähernd gleich (Abb. 3, Mitte). Mithilfe der Tukey-Post-hoc-Tests konnte kein statistisch signifikanter Effekt gefunden werden. Für den Greiffall 5Finger war daher die Nullhypothese beizubehalten. Auch für diese Greiftätigkeit waren keine systematischen probandenspezifischen Effekte über die Versuchsbedingungen Exoskelett Off, On_LT0 und On_LT85 erkennbar (Abb. 3, Mitte). Mit eingeschaltetem Exoskelett und Locking Tendency 0 (On_LT0) erhöhte sich die elektrische Muskelaktivität des M.FDS für 3 von 12 Testpersonen deutlich (> RMSE = 5,40 %MVE), mit On_LT85 für zwei Testpersonen. Ausgehend von Exoskelett Off waren relative probandenspezifische Steigerungen der Muskelaktivität von 21,35 % bis hin zu 91,86% zu verzeichnen (Mean On_LT0 = 68,20 % (SD = 34,58 %), Mean On_LT85 = 36,30 % (SD = 21,14 %)).
HandUmf
Für den Greiffall HandUmf reduzierte sich der Mittelwert der Muskelaktivität des M.FDS von 33,23 %MVE für Exoskelett Off auf 28,87 %MVE (On_LT0) und dann auf 26,98 %MVE (On_LT85, Abb. 3, unten). In diesem Kontext waren in den Post-hoc-Tests sowohl die Reduktion der Muskelaktivität von Exoskelett Off auf On_LT0 um 4,35 %MVE (p = 0,0123, 95%-KI [1,36 %MVE; 7,35 %MVE]) als auch von Off auf On_LT85 um 6,24 %MVE (p = 0,0001, 95%-KI [3,25 %MVE; 9,24 %MVE]) statistisch signifikant. Relativ zur Versuchsbedingung Exoskelett Off reduzierte On_LT0 die Muskelaktivität um 13 % (95%-KI [4 %; 22 %]) und On_LT85 um 19 % (95%-KI [10 %; 28 %]). Für beide statistisch signifikanten Effekte war die Nullhypothese zu verwerfen und die Alternativhypothese anzunehmen (intendierter reduzierender Effekt). Die IronHand® zeigte für die Greiftätigkeit HandUmf konsistent über nahezu alle Testpersonen einen Muskelaktivität reduzierenden Effekt (Abb. 3, unten). Deutliche probandenspezifische Steigerungen der elektrischen Muskelaktivität waren weder für Exoskelett On_LT0, noch für On_LT85 zu verzeichnen.
Diskussion
In der vorliegenden Studie wurde der Effekt eines aktiven Hand-Exoskeletts (IronHand®) auf die elektrische Aktivität des M.FDS untersucht. Als praxisnahe Anwendungsfälle wurden die drei häufigsten Greiffälle in der Automobilmontage ausgewählt. Elementare erste Voraussetzung für den Einsatz eines Exoskeletts in der industriellen Montage ist, dass es arbeitsbedingte Beanspruchungen effektiv reduzieren kann. Die arbeitsbedingte Belastung der Hand und des Unterarms wird bei Greiftätigkeiten hauptsächlich von erforderlicher Kraft und Wiederholungsanzahl bestimmt. Bei unterstützendem Einsatz der IronHand® sollte eine geringere elektrische Muskelaktivität der Unterarmflexoren messbar sein.
Unterschiede zwischen den Greifbedingungen
Die Ergebnisse zeigen allerdings, dass der gemessene Effekt der IronHand® in Abhängigkeit vom jeweiligen Griff variiert. Nur für den Greiffall (HandUmf) konnte eine systematische und statistisch signifikante Reduktion der Muskelaktivität über die Unterstützungsgrade Off, On_LT0, On_LT85 nachgewiesen werden. Für die übrigen Greiffälle (2Finger, 5Finger) zeigt sich keine Reduktion der muskulären Aktivität des M.FDS. Für den Greiffall 2Finger erhöht sich die Muskelaktivität von Exoskelett Off auf On_LT0 sogar statistisch signifikant um 4,33 %MVE (95%-KI [1,88 %MVE; 6,78 %MVE]). Dies entspricht, ausgehend von Exoskelett Off, einer um 23 % höheren Muskelaktivität des M.FDS.
Eine mögliche Ursache für die beobachtete Diskrepanz zwischen den unterschiedlichen Greiffällen ist der Verlauf des resultierenden Griffkraftvektors (Differenz aus dem natürlichen Kraftvektor der Hand und dem künstlichen Zugkraftvektor der IronHand®). Letzterer hängt maßgeblich von der Ausrichtung der Zugseile in den weichen Handschuhen des Exoskeletts ab und kann – je nach Stellung der Finger – mitunter deutlich von der anatomisch optimalen Richtung abweichen. Bedingt wird dies dadurch, dass die künstlichen Sehnen des IronHand®-Handschuhs – im Gegensatz zu den echten Sehnen der Finger, die durch Ring- und Kreuzbänder eng an den Fingerknochen gehalten werden – unter Kraft/Spannung nicht in jeder Fingerposition gleichmäßig eng an den Fingern anliegen. Dies ist mit künstlichen Sehnen in einem Handschuh technisch kaum zu realisieren, da ein sehr eng anliegender und radial zugfester Handschuh sowohl die Fingerbeweglichkeit als auch den Blutfluss in den Fingern beeinträchtigen würde. Darüber hinaus setzen die künstlichen Sehnen der IronHand® nur in den Fingerspitzen an, was bei Griffen mit eher gestreckten Fingern, wie 2Finger und 5Finger, Scherkräfte auf die Fingergelenke induziert und den Wirkungsgrad der IronHand® vermindert. Die gemessene Veränderung der EMG-Aktivität könnte in diesem Fall eine Kompensationsaktivität des M.FDS als Reaktion auf die vom Exoskelett künstlich induzierte Scherkraft darstellen. Für diese Annahme spricht, dass der Griff HandUmf, bei dem potenziell die günstigste Ausrichtung zwischen den künstlichen Sehnen des Handschuhs und den Sehnen der Hand/Finger vorliegt, als einziger eine Reduktion der neuromuskulären Aktivität zeigt.
Für den praktischen Einsatz der IronHand® oder vergleichbarer Hand-Exoskelette in der industriellen Montagepraxis wäre ein derartiger Kompensationsmechanismus negativ zu bewerten, da gerade eher unnatürliche Greifarten mit gesteckter Fingerhaltung, wie der 2Finger- oder 5Finger-Griff (entsprechend der Systematik der Greifarten nach Bullinger et al. 1979), ein hohes Potenzial hätten, arbeitsbedingte Beanspruchungen zu reduzieren, und noch dazu häufig vorkommen (Walther 2015).
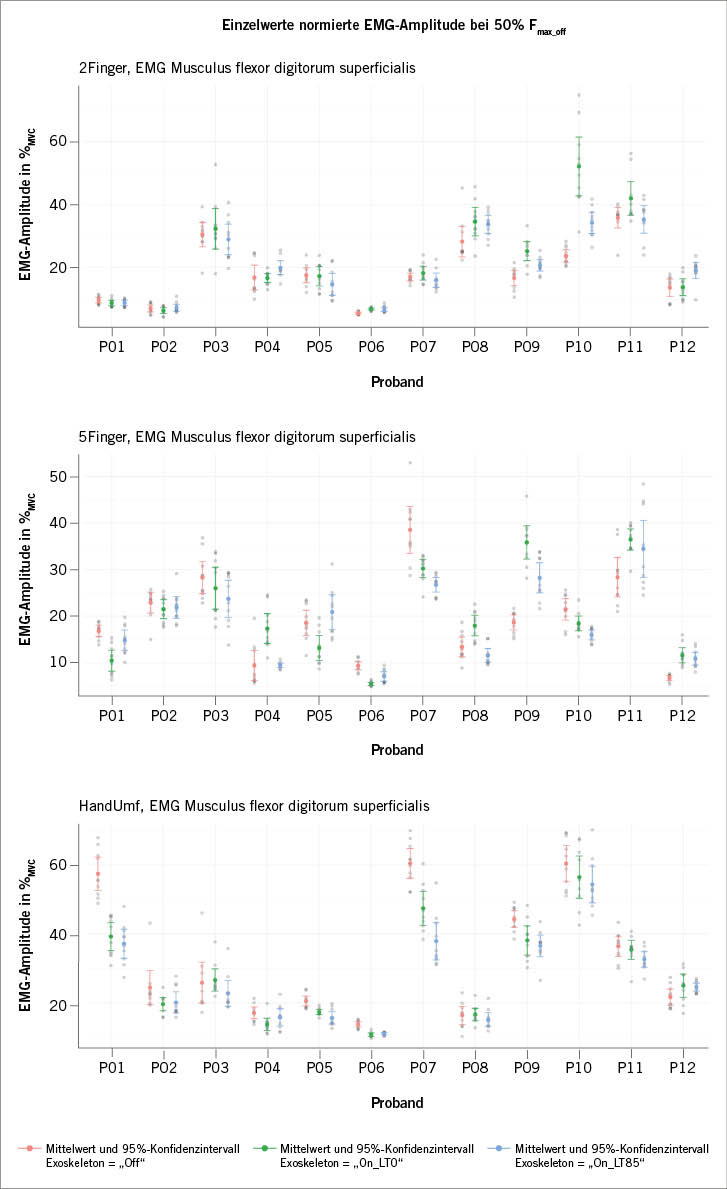
Fig. 4: Subject-specific muscle activity M. flexor digitorum superficialis at 50 % Fmax_off (grip tasks 2Finger, 5 Finger and HandUmf)
Probandenspezifische Unterschiede
Die in den jeweiligen Greifbedingungen ermittelten Interventionseffekte durch das aktive Exoskelett zeichnen sich weiterhin durch individuelle Unterschiede zwischen den einzelnen Testpersonen aus (➥ Abb. 4). So zeigen sich für die Versuchsbedingungen 2Finger und 5Finger deutliche probandenspezifische Steigerungen der Muskelaktivität bei Nutzung der IronHand®, die über dem intraindividuellen Messfehler liegen (RMSE). Bei 2Finger-Greiftätigkeiten erhöht sich die Muskelaktivität des M.FDS bei einem Drittel der Testpersonen um bis zu 120 % (Referenzniveau Exoskelett Off). Für den Greiffall 5Finger sind bei einem Viertel der Teilnehmenden Steigerungen der Muskelaktivität von 21,35 % bis hin zu 91,86 % zu verzeichnen. Bei a priori unbekannten Effektgrößen sollte, neben klassischen Signifikanztests, daher eine detaillierte explorative Analyse der Exoskelett-Effekte auf Probandenebene erfolgen. Bei ausschließlicher Fokussierung auf statistische Signifikanz besteht in der vorliegenden Studie für den Greiffall 5Finger ansonsten die Gefahr, davon auszugehen, dass „nur“ kein Effekt vorliegt, obwohl für ein Viertel der Testpersonen deutliche Steigerungen (> RMSE) der Muskelaktivität zu verzeichnen sind.
Diese interindividuellen Unterschiede könnten zumindest teilweise durch anatomische Unterschiede, wie Handgröße, Fingerlänge, Länge und Ansatz von Muskeln und Sehnen bedingt sein. Trotz Bestimmung der Handschuhgröße nach Größenangaben des Herstellers, lassen sich kleine Unterschiede in der Passung der Handschuhe nicht vollständig vermeiden. Diese könnten ebenfalls einen Effekt auf die Wirksamkeit des Exoskeletts haben. Negatives Feedback der Testpersonen zur Passform der Handschuhe gab es allerdings nicht. Ein Proband mit besonders großen Händen berichtete von leichten Schwierigkeiten beim Greifen des Handdynamometers, konnte das Messprotokoll aber vollständig absolvieren.
Weitere intrasubjektive Faktoren, wie die subjektive Wahrnehmung des Unterstützungsgrades oder der Ermüdungs- beziehungsweise Trainingszustand der Muskulatur wurden nicht als Gegenstand der vorliegenden Untersuchung definiert. Für eine umfassendere Bewertung der mess- und wahrnehmbaren Wirkungsweise des untersuchten Hand-Exoskeletts könnten sie in Zukunft aber hilfreich sein und sollten daher perspektivisch als zufällige Effekte („random effects“) im statistischen Modell berücksichtigt werden.
Validität der Messergebnisse
Nicht abschließend bewertet werden kann die Validität der gemessenen abhängigen Variable myoelektrische Muskelaktivität. Grundsätzlich lässt sich aus myoelektrischen Signalen nicht unmittelbar auf die Zielgröße Hand-Kraft bzw. -Belastung rückschließen, da diese von weiteren Faktoren, wie den Rekrutierungs- und Frequenzierungseigenschaften der beteiligten motorischen Einheiten oder ganz allgemein von der Ausprägung der Muskulatur abhängen (Konrad 2011; Steinhilber et al. 2013). In diesem Zusammenhang stellt sich insbesondere die Frage, inwiefern die isolierte Analyse der Unterarmflexoren eine adäquate Erfassung komplexer motorischer Vorgänge gewährleistet. Möglicherweise auftretende Synergieeffekte und Rückkopplungen mit benachbarten Muskelgruppen des Unterarms können auf diese Weise nicht erfasst werden. Denkbar ist zum Beispiel, dass sich die myoelektrische Aktivität der untersuchten Muskelgruppe erhöht, simultan jedoch eine andere Muskelgruppe, etwa die Unterarmextensoren, stark entspannt wird, was in Summe einer Reduktion der gesamten Muskelaktivität im Unterarm entsprechen könnte. Aus physiologisch anatomischer Perspektive ist das eben beschriebene Szenario eher unwahrscheinlich, dennoch sollte für zukünftige Untersuchungen die simultane Erfassung der Aktivität anderer Muskelgruppen im Unterarm in Erwägung gezogen werden. In zukünftigen Studien könnte durch Randomisierung der Exoskelettversuchsbedingungen einem eventuell auftretenden Gewöhnungs-/Lerneffekt, der systematische Änderungen der Muskelaktivität bedingen könnte, entgegengewirkt werden (Brueckner et al. 2018). Eine solche systematische Änderung ließ sich in der vorliegenden Studie nicht nachweisen, kann aber aufgrund des Studiendesigns nicht gänzlich ausgeschlossen werden. Darüber hinaus sind auf Basis der vorliegenden Studie bisher nur Aussagen zum Einfluss der IronHand® bei ca. 50 % der Maximalkraft möglich. Abweichende Kraftniveaus könnten andere Ergebnisse bedingen.
Schlussfolgerungen
Der Einsatz der IronHand® kann die myoelektrische Muskelaktivität des M.FDS im Handumfassungsgriff bei 50 % der Maximalkraft um 13 % (On_LT0, 95%-KI [4 %; 22 %]) beziehungsweise 19 % (On_LT85, 95%-KI [10 %; 28 %]) senken. Im 2-Finger- und 5-Finger-Zufassungsgriff erhöht sich für bis zu einem Drittel der Probanden die Muskelaktivität um bis zu 120 % (Referenzniveau ohne Unterstützung). Nach bisherigem Erkenntnisstand erscheint die IronHand® für diese Greiffälle, zumindest bei 50 % der Maximalkraft, als ungeeignet.
Literatur
Bagnara S, Tartaglia R, Albolino S, Alexander T, Fujita Y: Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018) 2019.
Bai S, Virk GS, Sugar T: Wearable exoskeleton systems. design, control and applications. London: Institution of Engineering & Technology, 2018.
Baltrusch SJ, van Dieën JH, Bruijn SM, Koopman AS, van Bennekom CAM, Houdijk H: The effect of a passive trunk exoskeleton on metabolic costs during lifting and walking. Ergonomics 2019; 7: 903–916.
Bao G, Pan L, Fang H, Wu X, Yu H, Cai S, Yu B, Wan Y: Academic review and perspectives on robotic exoskeletons. IEEE Trans Neural Syst Rehabil Eng 2019; 11: 2294–2304.
Bates D, Mächler M, Bolker B, Walker S: Fitting linear mixed-effects models using lme4. Journal of Statistical Software 2015; 1: 1–48.
Bioservo Technologies AB: Ironhand User manual. 2019. https://www.bioservo.com/assets/uploads/D00018802_14494.pdf (zuletzt abgerufen am: 19.05.2020).
Bioservo Technologies AB: Carbonhand®. 2020a. https://www.bioservo.com/healthcare/carbonhand (zuletzt abgerufen am: 10.06.2020).
Bioservo Technologies AB: Ironhand® – Keeps you healthy and efficient. 2020b. https://www.bioservo.com/professional/ironhand (zuletzt abgerufen am: 10.06.2020).
Bosch T, van Eck J, Knitel K, Looze M de: The effects of a passive exoskeleton on muscle activity, discomfort and endurance time in forward bending work. Appl Ergon 2016; 4: 212–217.
Brueckner D, Kiss R, Muehlbauer T: Associations between practice-related changes in motor performance and muscle activity in healthy individuals. A systematic review. Sports Med Open 2018; 1: 9.
Bullinger HJ, Solf JJ, Arbeitsschutz und Unfallforschung Bf: Ergonomische Arbeitsmittelgestaltung., Wirtschaftsverlag NW, 1979.
Cappello L, Meyer JT, Galloway KC, Peisner JD, Granberry R, Wagner DA, Engelhardt S, Paganoni S, Walsh CJ: Assisting hand function after spinal cord injury with a fabric-based soft robotic glove. J Neuroeng Rehabil 2018; 1: 59.
Chu C-Y, Patterson RM: Soft robotic devices for hand rehabilitation and assistance: a narrative review. J Neuroeng Rehabil 2018; 1: 9.
Sachgebiet Physische Belastungen. Einsatz von Exoskeletten an gewerblichen Arbeitsplätzen. 2019. https://publikationen.dguv.de/widgets/pdf/download/article/3579 (zuletzt abgerufen am: 08.06.2020).
Fox S, Aranko O, Heilala J, Vahala P: Exoskeletons. Comprehensive, comparative and critical analyses of their potential to improve manufacturing performance. Journal of Manufacturing Technology Management 2019: 71–91.
Galecki A, Burzykowski T: Linear mixed-effects models using R. A step-by-step approach. First. New York: Springer, 2013.
Gelman A, Hill J: Data analysis using regression and multilevel/hierarchical models. 16th printing. Cambridge: Cambridge Univ. Press, 2017.
Glitsch U: Analyse der Wirksamkeit von Exoskeletten (Aus der Arbeit des IFA Nr. 406 ). 2019. https://publikationen.dguv.de/widgets/pdf/download/article/3565 (zuletzt abgerufen am: 08.06.2020).
Gull MA, Bai S, Bak T: A review on design of upper limb Exoskeletons. Robotics 2020; 1: 16.
Hensel R, Keil M: Subjective evaluation of a passive industrial exoskeleton for lower-back support. A field study in the automotive sector. IISE Transact Occup Ergonom Human Factors 2019; 3–4: 213–221.
Hochberg C, Schwarz O, Schneider U: Aspects of human engineering – bio-optimized design of wearable machines. 2015, S. 184–197.
Howard J, Murashov VV, Lowe BD, Lu M-L: Industrial exoskeletons. Need for intervention effectiveness research. Am J Ind Med 2020; 3: 201–208.
Huysamen K, Bosch T, Looze M de, Stadler KS, Graf E, O’Sullivan LW: Evaluation of a passive exoskeleton for static upper limb activities. Appl Ergonom 2018; 5: 148–155.
Ingvast J, Holst H von, Wikander J: Strengthening Glove. A 61 F 5/01 2008.
Institute of Electrical and Electronics Engineers (IEEE): Wearable Robotics Association Conference (WeaRAcon), 2019.
Institute of Electrical and Electronics Engineers (IEEE): IEEE International Conference on Rehabilitation Robotics (ICORR). 11.–14. Aug. 2015. Singapore: Nanyang Technological University, 2015.
Knieps F, Pfaff H: BKK Gesundheitsreport 2019. Psychische Gesundheit und Arbeit 2019.
Konrad P: EMG-Fibel. Eine praxisorientierte Einführung in die kinesiologische Elektromyographie. 2011. http://www.velamed.com/wp-content/uploads/EMG-FIBEL-V1.1.pdf (zuletzt abgerufen am: 08.06.2020).
Koopman AS, Kingma I, Faber GS, Looze MP de, van Dieën JH: Effects of a passive exoskeleton on the mechanical loading of the low back in static holding tasks. J Biomech 2019; 2: 97–103.
Lenth R: emmeans. Estimated Marginal Means, aka Least-Squares Means 2020. https://CRAN.R-project.org/package=emmeans
Liebers F, Caffier G: Berufsspezifische Arbeitsunfähigkeit durch Muskel-Skelett-Erkrankungen in Deutschland. Forschung Projekt F 1996. Dortmund: Bundesanstalt für Arbeitsschutz und Arbeitsmedizin, 2009.
Looze MP de, Bosch T, Krause F, Stadler KS, O‘Sullivan LW: Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016; 5: 671–681.
Luger T, Cobb TJ, Seibt R, Rieger MA, Steinhilber B: Subjective Evaluation of a passive lower-limb industrial exoskeleton used during simulated assembly. IISE Transact Occup Ergonom Human Factors 2019; 3–4: 175–184.
Marino M: Impacts of using passive back assist and shoulder assist exoskeletons in a wholesale and retail trade sector environment. IISE Transact Occup Ergonom Human Factors 2019; 3–4: 281–290.
McFarland T, Fischer S: Considerations for industrial use. a systematic review of the impact of active and passive upper limb exoskeletons on physical exposures. IISE Transact Occup Ergonom Human Factors 2019; 3–4: 322–347.
neofact: A robotic glove that enables people with hand paralysis to complete daily activities. 2020. https://neomano.neofect.com/ (zuletzt abgerufen am: 10.06.2020).
Nussbaum MA, Lowe BD, Looze M de, Harris-Adamson C, Smets M: An Introduction to the Special Issue on Occupational Exoskeletons. IISE Transact Occup Ergonom Human Factors 2019; 3–4: 153–162.
Ohlander J, Keskin M-C, Weiler SW, Stork J, Radon K: Snap-fit assembly and upper limb functional limitations in automotive production workers. A nested case-control study. Int Arch Occup Environ Health 2019; 6: 813–819.
Osuagwu BAC, Timms S, Peachment R, Dowie S, Thrussell H, Cross S, Shirley R, Segura-Fragoso A, Taylor J: Home-based rehabilitation using a soft robotic hand glove device leads to improvement in hand function in people with chronic spinal cord injury:a pilot study. J Neuroeng Rehabil 2020; 1: 40.
Plegge C: Bedeutung und kinematische Untersuchung der Passform eines aktiven Exoskeletts für die untere Extremität. In: Weidner R (Hrsg): Technische Unterstützungssysteme, die die Menschen wirklich wollen. Hamburg: Laboratorium Fertigungstechnik smartASSIST Helmut Schmidt Universität, 2016.
Polygerinos P, Galloway KC, Sanan S, Herman M: EMG controlled soft robotic glove for assistance during activities of daily living. In: IEEE International Conference on Rehabilitation Robotics (ICORR). Piscataway, NJ: IEEE, 2015.
Popov D, Gaponov I, Ryu J-H: Portable exoskeleton glove with soft structure for hand assistance in activities of daily living. IEEE/ASME Trans. Mechatron. 2017; 2: 865–875.
Proulx CE, Beaulac M, David M, Deguire C, Haché C, Klug F, Kupnik M, Higgins J, Gagnon DH: Review of the effects of soft robotic gloves for activity-based rehabilitation in individuals with reduced hand function and manual dexterity following a neurological event. J Rehabil Assist Technol Eng 2020; 1: 1–18.
R. Core Team: R. A Language and environment for statistical computing. Vienna, Austria 2019.
Radder B, Prange-Lasonder GB, Kottink AIR, Holmberg J, Sletta K, van Dijk M, Meyer T, Melendez-Calderon A, Buurke JH, Rietman JS: Home rehabilitation supported by a wearable soft-robotic device for improving hand function in older adults: A pilot randomized controlled trial. PLoS ONE 2019; 8: 1–19.
Radder B, Prange-Lasonder GB, Kottink AI, Gaasbeek L, Holmberg J, Meyer T, Melendez-Calderon A, Ingvast J, Buurke JH, Rietman JS: A wearable soft-robotic glove enables hand support in ADL and rehabilitation: A feasibility study on the assistive functionality. J Rehabil Assist Technol Eng 2016; 1: 1–18.
Rashedi E, Kim S, Nussbaum MA, Agnew MJ: Ergonomic evaluation of a wearable assistive device for overhead work. Ergonomics 2014; 12: 1864–1874.
Schmidt RF, Lang F, Heckmann M (Hrsg.), Physiologie des Menschen (mit Pathophysiologie), 31. Aufl. Berlin, Heidelberg: Springer, 2011.
Shahid T, Gouwanda D, Nurzaman SG, Gopalai AA: Moving toward soft robotics: a decade review of the design of hand exoskeletons. Biomimetics (Basel) 2018; 3: 1–20.
Smets M: A field evaluation of arm-support exoskeletons for overhead work applications in automotive assembly. IISE Transact Occup Ergonom Human Factors 2019; 3–4: 192–198.
Spada S, Ghibaudo L, Carnazzo C, Gastaldi L, Cavatora MP: Passive upper limb exoskeletons. An experimental campaign with workers. In: Bagnara S, Tartaglia R, Albolino S, Alexander T, Fujita Y (Hrsg.): Proceedings of the 20th Congress of the International Ergonomics Association (IEA 2018). Cham: Springer International Publishing, 2019.
Steinhilber B, Anders C, Jäger M, Läubli T, Luttmann A, Rieger MA, Scholle H-C, Schumann N-P, Seibt R, Strasser H, Kluth K: Oberflächen-Elektromyographie in der Arbeitsmedizin, Arbeitsphysiologie und Arbeitswissenschaft. 2013. https://www.awmf.org/uploads/tx_szleitlinien/002-016l_S2k_Oberfl%C3%A4c… (zuletzt abgerufen am: 11.07.2020).
Steinhilber B, Luger T, Schwenkreis P, Middeldorf S, Bork, Hartmut, Bork, Mann b, van Glinski A, Schildauer T, Weiler S, Schmauder M, Heinrich K, Winter G, Schnalke G, Frener P, Wischniews S: Einsatz von Exoskeletten im beruflichen Kontext zur Primär-, Sekundär-, und Tertiärprävention von arbeitsassoziierten muskuloskelettalen Beschwerden. 2020. https://www.awmf.org (Anm. d. Red.: Ziel-Link nicht mehr gültig, abgerufen am 8.7.2021).
Team RC: R. A language and environment for statistical computing. Vienna, Austria 2019. https://www.R-project.org/
Tendo AB: tendo. The product. 2020. https://www.tendoforpeople.se/tendo (zuletzt abgerufen am: 10.06.2020).
Theurel J, Desbrosses K, Roux T, Savescu A: Physiological consequences of using an upper limb exoskeleton during manual handling tasks. Appl Ergonom 2018: 211–217.
Troncossi M, Mozaffari-Foumashi M, Parenti-Castelli V: An original classification of rehabilitation hand exoskeletons. J Robot Mech Eng Res 2016; 4: 17–29.
Verl A, Albu-Schäffer A, Brock O, Raatz A: Soft Robotics. Berlin, Heidelberg: Springer, 2015.
Voilque A, Masood J, Fauroux J, Sabourin L, Guezet O: Industrial exoskeleton technology: classification, structural analysis, and structural complexity indicator. In: IEEE (Hrsg): Wearable Robotics Association Conference (WeaRAcon). 2019.
Vries Ad, Looze M de: The effect of arm support exoskeletons in realistic work activities: a review study. J Ergonom 2018; 255.
Walther M: Entwicklung und Evaluierung eines systematischen Vorgehens zur Erfassung von Aktionskräften in der Automobilproduktion. Dissertation, Technische Universität Chemnitz 2015.
Weidner R: Technische Unterstützungssysteme, die die Menschen wirklich wollen. Zweite Transdisziplinäre Konferenz 2016.
Winter B: Linear models and linear mixed effects models in R with linguistic applications. 2013. https://arxiv.org/ftp/arxiv/papers/1308/1308.5499.pdf (zuletzt abgerufen am: 10.07.2020).
Interessenkonflikt: Der Koautor Dr.-Ing. Hensel-Unger ist bei der Audi AG beschäftigt. Die Audi AG hat die vorliegende Studie finanziell und materiell unterstützt. Ein Interessenskonflikt liegt nicht vor.
Kontakt:
Dr. rer. nat. Tobias Mayer
Technische Universität Chemnitz
Fakultät für Human- und Sozialwissenschaften
Institut für Angewandte Bewegungswissenschaften
Professur Forschungsmethoden und Analyseverfahren in der Biomechanik
Thüringer Weg 11 – 09126 Chemnitz
tobias.mayer@hsw.tu-chemnitz.de




